Abstract
In this study, a model-based method is employed to identify damage of structure. First, a hybrid objective function is proposed based on vibration data, which consists of frequency and modal strain energy. Then, the inverse problem of damage detection is solved by the single-objective optimization algorithm called ICA. Accuracy of the proposed method is shown by utilizing two different case studies (numerical and experimental). The obtained results of ICA are compared with other commonly used optimization algorithms in damage identification, i.e. particle swarm optimization (PSO).
1. Introduction
When a crack occurs in the structure, it affects the dynamical properties of that structure; for example it decreases the bending stiffness and/or increase the damping of structures. The damage detection process using vibration data is usually categorized in four major types: natural frequency based methods, mode shape based methods, curvature/strains based methods and methods based on suing both mode shape and frequency. Doebling et al. [1] presented a review of vibration based damage detection (VBDD) methods. Pandey and Biswis [2], proposed a damage detection technique by using changes in modal flexibility and comparing the flexibility matrices of the intact and damage structures. They evaluated their method with the help of numerical and experimental models and studied the effect of the number of measured modes. Since two last decades, VBDD using optimization algorithms has been an exciting scope for researchers. One of the most practical algorithms is the Genetic Algorithm (GA) which was first introduced by Holland in mid-1960s [3]. Jaishi and Ren [4] used GA to minimize the objective function consisting of the modal flexibility residual, and then identified location and damage size for a simply supported beam. They propose a damage detection technique procedure based on finite element (FE) model updating and modal flexibility residual. Perera et al. [5] used two different objective functions which were the combination of flexibility matrix and modal assurance criterion (MAC). They studied the performance of multi-criteria damage identification GA. Ruotolo and Surace [6] proposed a procedure based on the modal parameters to identify damage and its severity in a multiple cracked beam using genetic algorithm. They evaluated their method by using both numerical simulations and experimental tests for a cantilevered steel beam. Hao et al. [7] used three various parameters, namely, frequency changes, mode shape changes and a combination of the two. They formed an objective function by comparing the changes in the measurements before and after occurring damage and then used GA for minimization process. They evaluated their approach by using both numerical results and laboratory tests, and they showed that their technique is practical even if the analytical model is not accurate. Using the other optimization techniques is also reported including ant colony optimization [8], particle swarm optimization (PSO) [9], hybrid particle swarm optimization [10]. In this work, damage localization problem in beam-type structures is solved with the help of first four natural frequencies and mode shapes. First, an objective function is proposed with the help of hybrid vibration data. Then, an evolutionary algorithm called ICA is utilized in the damage detection procedure. Accuracy of the proposed approach is shown by considering two case studies. In addition, obtained results of ICA-based approach are compared with PSO-based approach.
2. Imperialistic competitive algorithm
This algorithm was first proposed by Atashpaz-Gargari and Lucas [11]. The first step to implement this algorithm is to choose an initial number of populations which are called countries. In this algorithm each country is a array that is equal to a chromosome in GA. The cost for a country is found by evaluating the which is a function of variables:
From social-political viewpoint, the unknown variables of cost function are historical and cultural identities of a country. For determining the initial empires, some of the best countries are selected as imperialists and the remaining countries from their colonies. Next step is to adopt the assimilation policy with the aim of evaluating the cultural and social structure of the colonies. In fact, a central government tries to assimilate the colonies. The next step to model the algorithm is to replace the imperialist with a colony, which is approaching the imperialist, when this colony achieves a better situation compared to its imperialist (i.e. this colony finds a point in which it has a lower cost in comparison to the imperialistic approach). In this situation, imperialist and colony will change their positions with each other and new imperialist starts to apply the assimilation policy to the colonies. Then, empires start to compete and each empire which cannot increase its power during the imperialist competitive will be eliminated. In order to increase their power, imperialists have to develop their colonies. Over time, colonies come close to the imperialists in terms of power and a kind of convergence process is observed. The algorithm continues to progress until the convergence condition is satisfied. Having a unique empire in the world along with the colonies which are very close to the empire in terms of position is the ultimate goal of the imperialist competitive algorithm.
3. Method of damage detection
3.1. Theory and background
The matrix form of the dynamic equation for a multi-degree-of-freedom (MDOF) system without damping is given by:
In Eq. (2), and are mass and stiffness matrix with dimensions . is displacement vector and is the number of degrees of freedom. Natural frequencies and mode shapes for a system with degrees of freedom is obtained by solving the associated eigenvalue problem:
Here, is normalized eigenvector and is its related eigenvalue.
3.2. Modeling of crack
When a crack occurs in a structure, affects the physical properties of the system and reduces stiffness of the structure. This change in stiffness is considered by using the following equation:
where and are the element stiffness matrices of the damaged and undamaged structures, respectively. Also, is the stiffness reduction factor for an element and is defined as the ratio of stiffness reduction in initial stiffness. In this equation, is the number of elements of the structure.
4. Objective function
4.1. Frequency changes
Friswell and Mottershed [12] offered a method based on the sensitivity. In this method, they used the minimization of the difference between measured modal parameters (natural frequencies and mode shapes) and predicted by the model. This issue can be defined as follows in a format of minimization of function:
In Eq. (5), superscripts show eigenvalues predicted with the help of finite element model of the structure where is eigenvalues obtained of cracked structure. is the number of measured modes.
4.2. Modal strain energy
The general form of strain energy of a structure with global stiffness matrix and global displacement vector is as follows:
In equation (6) is a vector with complete set of displacement. If a structure with MDOF was modeled, this vector has components and stiffness matrix is by . Basically, forming the complete strain energy requires measuring all DOF’s of the structure which is practically impossible. Therefore, if it is essential incomplete modal data for damage detection, the rank of should be reduced. If the measured modes are mass-normalized, using Moore-Penrose pseudoinverse method (Doebling et al. [13]) provides the modal strain energy for mode shape as:
Now, the hybrid objective function can be determined as follows:
5. Case studies
5.1. Numerical example
Fig. (1) is shown a clamped-free aluminium beam with Young’s modulus 71 GPa, and density which is simulated by the finite element model of Euler-Bernoulli beam.
Fig. 1FE models of clamped-free beam
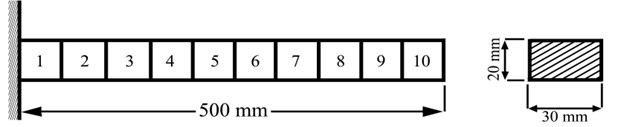
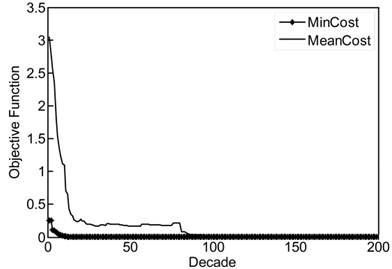
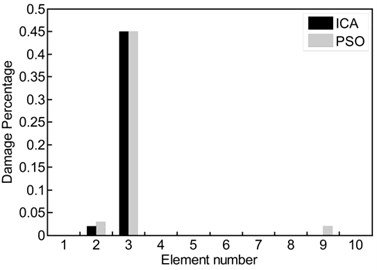
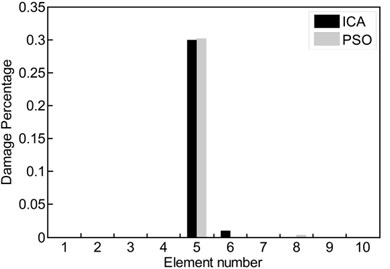
Fig. 2a) ICA feature selection searching for optimal solutions in clamped-free beam example; damage percentage obtained of ICA and PSO for different cases: b) case 1, c) case 2, d) case 3
a)
b)
c)
d)
5.2. Computational experiments with Euler-Bernoulli beam
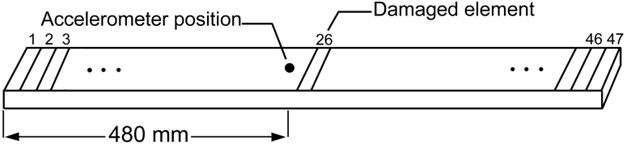
A free-free beam with 47 elements and length is simulated by using Euler-Bernoulli beam model. Each node has two DOFs, i.e. translation and rotation. Properties of the beam are as follows: Young’s modulus density cross-sectional area and the moment of inertia . The beam was excited using a hammer type BK8202 and force signal was amplified by an amplifier type BK-2647A. An accelerometer type DJB-A/120 V was placed at 480 mm from left end. A saw cut damage with 60 % extent was induced in 510 mm from the left end which is located at 26th element. Responses and force signals were measured and frequency response functions (FRFs) were extracted through PULSE software 8 [14]. The MODENT modulus of ICATS software [15] was used to obtain the first four mode shapes of the beam.
Fig. 3Schematic of free-free beam
6. Results and discussion
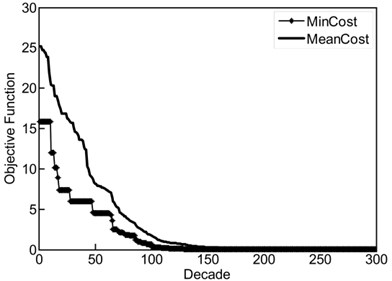
Equation (9) associated with is the constrained optimization problem which should be solved using ICA. The number of arrays of vector is equal to the number of elements of the FE model. Based on ICA, the purpose is to find the optimum solution (minimum point) for the objective function. Search for the minimum point is equivalent to search for damaged element. Damage severity of an element is considered as a stiffness reduction factor and running parameters of ICA and PSO are shown in Table 1. The numerical case study is illustrated in Fig. 1. Fig. 2a shows ICA feature selection searching for optimal solutions in clamped-free beam example.
Table 1Run parameters used to the ICA and PSO
Algorithm | Parameter | Value |
ICA | Initial countries | 35 |
Initial imperialistics | 12 | |
Number of decades | 300 | |
Revolution rate | 0.3 | |
PSO | Population size | 60 |
Number of iterations | 300 |
Table 2Simulated damage scenarios for clamped-free beam
Case no. | Scenario |
1 | 45 % in third element |
2 | 30 % in fifth element |
3 | 50 % in seventh element |
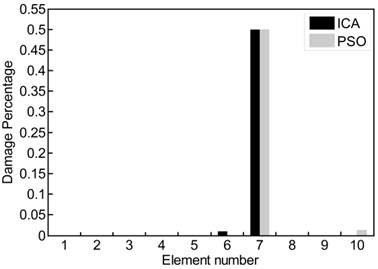
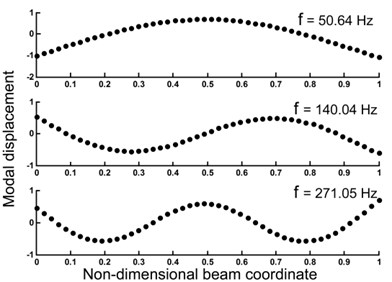
The estimated damage percentage (obtained from ICA) is compared with the outcomes PSO-based procedure in Figs. 2(b)-(d). In these figures, three different damage scenarios (Table 2) are considered over clamped-free beam, and the obtained results show that the hybrid objective function proposed can detect the location and the extent of the damage accurately. In the first case (Fig. 2(b)), when 45 % damage was considered in the third element, both algorithms ICA and PSO (black and gray columns, respectively) predicted the location and the extent of the damage accurately. In cases 2 and 3 (Figs. 2(c)-(d)), 30 % and 50 % damages were considered in fifth and seventh elements, respectively. With the help of proposed method, both algorithms were predicted the location and the extent of the damage with acceptable accuracy. However, there are often differences between obtained results from numerical simulation and what happens in reality. In the model-based methods, the main problem arises from the non-accuracy of FE model of the structure. In this task, we use experimental test data of a free-free beam in conjunction with a FE model to discern damage site. Fig. 3 shows a schematic model of the beam. Fig. 4(a) provides ICA feature selection searching for optimal solutions in the experimental case study. In Fig. 4(b) the first three frequencies and mode shapes of damaged beam are shown. Fig. 5(a) represent the estimated severity and location of damage for the free-free beam. Increasing the number of iterations leads to the reduction of error in predicting the location of damage. In Fig. 5(b), obtained result from ICA is compared with the result of PSO-based procedure where first four vibration data (frequencies and mode shapes) of the structure are used.
Fig. 4a) ICA feature selection searching for optimal solutions, b) the first three frequencies and mode shapes of damaged beams (obtained by test)
a)
b)
Fig. 5a) Effect of number of iterations in damage localization, b) comparison between damage estimated by ICA and PSO
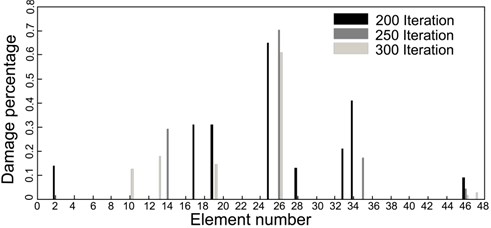
a)
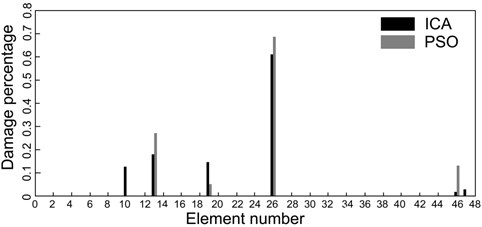
b)
7. Conclusions
In the present study, the aim was solving the inverse problem of damage detection using an evolutionary optimization algorithm called ICA. First, an objective function based on natural frequency and modal strain energy was proposed. Then, two case studies (numerical and experimental) were used to show that this function is able to identify the severity and location of the damage accurately. In this task, damage localization was performed without model updating and it was observed that a non-accurate model of the beam structure can be used in the damage detection process. Due to the difficulties in measuring all of the vibration modes in modal testing, a mode selection strategy was used based on selecting the lowest measured modes. These modes finally formed the modal strain energy. Furthermore, a comparison was drawn between the obtained results from ICA-based approach and result of PSO-based approach whereas the former was able to estimate damage in terms of its extent and site better.
References
-
Doebling S. W., Farrar C. R., Prime M. B. A summary review of vibration-based damage identification methods. Shock and Vibration Digest, Vol. 30, Issue 2, 1998, p. 91-105.
-
Pandey A. K., Biswas M. Damage detection in structures using changes in flexibility. Journal of Sound and Vibration, Vol. 196, Issue 1, 1994, p. 3-17.
-
Mitchell M. Genetic algorithms: an overview. Complexity, Vol. 1, Issue 1, 1995, p. 31-39.
-
Jaishi B., Ren W. X. Damage detection by finite element model updating using modal flexibility residual. Journal of Sound and Vibration, Vol. 290, Issue 1, 2006, p. 369-387.
-
Perera R., Ruiz A., Manzano C. Performance assessment of multicriteria damage identification genetic algorithms. Computers & Structures, Vol. 87, Issue 1, 2009, p. 120-127.
-
Ruotolo R., Surace C. Damage assessment of multiple cracked beams: numerical results and experimental validation. Journal of Sound and Vibration, Vol. 206, Issue 4, 1997, p. 567-588.
-
Hao H., Xia Y. Vibration-based damage detection of structures by genetic algorithm. Journal of Computing in Civil Engineering, Vol. 16, Issue 3, 2002, p. 222-229.
-
Majumdar A., Maiti D. K., Maity D. Damage assessment of truss structures from changes in natural frequencies using ant colony optimization. Applied Mathematics and Computation, 2012.
-
Begambre O., Laier J. A hybrid Particle Swarm Optimization – Simplex algorithm (PSOS) for structural damage identification. Advances in Engineering Software, Vol. 40, Issue 9, 2009, p. 883-891.
-
Sandesh S., Shankar K. Application of a hybrid of particle swarm and genetic algorithm for structural damage detection. Inverse Problems in Science and Engineering, Formerly Inverse Problems in Engineering, Vol. 18, Issue 7, 2010, p. 997-1021.
-
Atashpaz-Gargari E., Lucas C. Imperialist competitive algorithm: an algorithm for optimization inspired by imperialistic competition. Evolutionary Computation, CEC IEEE Congress, 2007, p. 4661-4667.
-
Friswell M., Mottershead J. E. Finite Element Model Updating in Structural Dynamics. Springer, 1995.
-
Doebling S. W., Hemez F. M., Peterson L. D., Farhat C. Improved damage location accuracy using strain energy-based mode selection criteria. AIAA Journal, Vol. 35, Issue 4, 1997, p. 693-699.
-
PULSE. Version 8.0, Bruel & Kjær, Sound & Vibration Measurement A/S, 1996-2003.
-
MODENT. Integrated Software for Structural Dynamics, ICATS 1988-2000, Imperial College of Science, Technology and Medicine, University of London, UK.
About this article
